












overview
A motor refers to an electromagnetic device that converts or transmits electrical energy based on the law of electromagnetic induction, or converts one form of electrical energy into another. Electric motors convert electrical energy into mechanical energy (commonly known as motors), while generators convert mechanical energy into electrical energy. Electric motors are represented by the letter “M” (old standard used “D”) in circuits. Its main function is to generate driving torque as a power source for electrical appliances or various machinery.
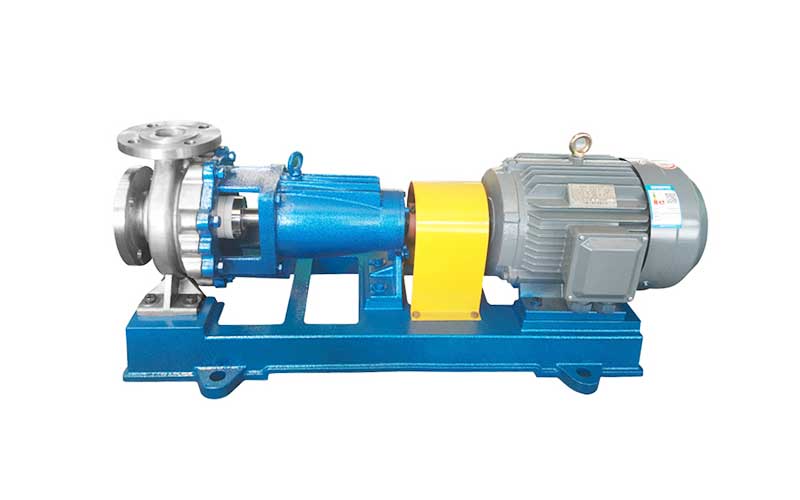
YFB4 series dust explosion-proof low voltage three-phase asynchronous motor
Frame number: H80-355
Capacity: 0.55~315kW
Number of poles: 2~10P
Voltage: 1140v and below
Main categories
1. According to the type of working power supply, it can be divided into DC motors and AC motors.
1) DC motors can be divided into brushless DC motors and brushless DC motors according to their structure and working principle.
Brushed DC motors can be divided into permanent magnet DC motors and electromagnetic DC motors.
Electromagnetic DC motors are divided into series excited DC motors, parallel excited DC motors, separately excited DC motors, and compound excited DC motors.
Permanent magnet DC motors are divided into rare earth permanent magnet DC motors, ferrite permanent magnet DC motors, and aluminum nickel cobalt permanent magnet DC motors.
2) AC motors can also be divided into single-phase motors and three-phase motors.
2. According to structure and working principle, it can be divided into DC motors, asynchronous motors, and synchronous motors.
1) Synchronous motors can be divided into permanent magnet synchronous motors, reluctance synchronous motors, and hysteresis synchronous motors.
2) Asynchronous motors can be divided into induction motors and AC commutator motors.
Induction motors can be divided into three-phase asynchronous motors, single-phase asynchronous motors, and shielded pole asynchronous motors.
AC commutator motors can be divided into single-phase series excited motors, AC/DC dual-purpose motors, and repulsive motors.
3. According to the starting and operating modes, it can be divided into: capacitor starting single-phase asynchronous motor, capacitor running single-phase asynchronous motor, capacitor starting running single-phase asynchronous motor, and split phase single-phase asynchronous motor.
4. According to their uses, they can be divided into drive motors and control motors.
1) Electric motors for driving can be divided into: electric motors for electric tools (including drilling, polishing, polishing, slotting, cutting, hole expanding, etc.), electric motors for household appliances (including washing machines, electric fans, refrigerators, air conditioners, recorders, video recorders, DVD players, vacuum cleaners, cameras, hair dryers, electric shavers, etc.), and other general small mechanical equipment (including various small machine tools, small machinery, medical equipment, electronic instruments, etc.).
2) Control motors are further divided into stepper motors and servo motors.
5. According to the structure of the rotor, it can be divided into cage induction motors (formerly known as squirrel cage asynchronous motors) and wound rotor induction motors (formerly known as wound asynchronous motors).
6. According to the operating speed, it can be divided into: high-speed motor, low-speed motor, constant speed motor, and variable speed motor. Low speed motors are further divided into gear reduction motors, electromagnetic reduction motors, torque motors, and claw pole synchronous motors.
Speed regulating motors can be divided into stepless constant speed motors, stepless constant speed motors, stepless variable speed motors, and stepless variable speed motors, as well as electromagnetic speed regulating motors, DC speed regulating motors, PWM variable frequency speed regulating motors, and switched reluctance speed regulating motors.
The rotor speed of an asynchronous motor is always slightly lower than the synchronous speed of the rotating magnetic field.
The rotor speed of a synchronous motor is independent of the load size and always remains at synchronous speed.
Motor power calculation:
Set the shaft power as Ne, the motor power as P, and K as the coefficient (reciprocal efficiency).
Motor power P=Ne*K(K has different values when Ne is different)
Ne≤22 K=1.25
22<Ne≤55 K=1.15
55<Ne K=1.00
FAQ
Q: At what high temperature can the general motor work normally? How high the motor can stand
What’s the temperature?
A: If the temperature of the motor cover exceeds the ambient temperature by more than 25 degrees, it indicates that the temperature rise of the motor has exceeded the normal range, and the general motor temperature rise should be below 20 degrees. Generally, the motor coil is wound by enameled wire, and when the temperature of the enameled wire is higher than 150 degrees, the paint film will fall off because of high temperature, resulting in short circuit of the coil. When the coil temperature is above 150 degrees, the motor housing shows a temperature of about 100 degrees, so if the housing temperature is based on the motor to withstand the maximum temperature of 100 degrees.
Q: The temperature of the motor should be below 20 degrees Celsius, that is, the temperature of the motor end cover should exceed the ambient temperature
Less than 20 degrees Celsius, but what is the reason why the motor heats more than 20 degrees Celsius?
A: The direct cause of motor heating is caused by large current. Generally, it may be caused by short circuit or open circuit of the coil, demagnetization of the magnetic steel or low efficiency of the motor, and the normal situation is that the electric current runs for a long time.
Q: What is the allowable temperature rise for a general click? Which part of the motor is most affected by the temperature rise of the motor? How is it defined?
A: When the motor load is running, from the point of trying to play its role, the larger the load, that is, the better the output power (if the mechanical strength is not considered). But the higher the output power, the higher the loss power, the higher the temperature. We know that the weakest thing in the temperature resistance of the motor is the insulating material, such as enamelled wire. There is a limit to the temperature resistance of insulating materials, within this limit, the physical, chemical, mechanical, electrical and other aspects of the insulation material are very stable, and its working life is generally about 20 years. Beyond this limit, the life of the insulation material will be dramatically shortened, and even burn. This temperature limit is called the allowable temperature of the insulation material. The allowable temperature of the insulation material is the allowable temperature of the motor; The life of the insulating material is generally the life of the motor.
Q: What causes the high temperature of the caller?
A:1. When the motor’s immediate voltage exceeds the rated voltage by more than 10%, or the motor’s immediate voltage is lower than the rated voltage by more than 5%, it will cause the motor to heat up and the temperature to rise under the rated load, so the voltage should be checked and adjusted.
2, the motor three-phase power supply voltage imbalance will also cause the motor heat, this is because when the three-phase power supply voltage imbalance of more than 5% will cause the three-phase current imbalance, the solution is to check and adjust the voltage.
3, the motor’s power switch contact problem and a phase fuse break will cause a lack of phase operation, resulting in a rise in the temperature of the motor, the solution is to repair or replace the damaged parts.
4, the motor winding wiring is wrong, so that the motor running under the rated load overheating phenomenon, the solution is to correct the winding wire wiring error.
5, the motor stator winding turns or interphase short circuit or ground, such a situation will cause the motor current increase and temperature rise, the solution is to add insulation in the center or directly replace the winding.
6. The cage rotor of the motor is broken or the coil joint of the winding rotor is loose, which will cause the current of the maintenance network to increase and heat up. The solution is to weld or replace the rotor.
7, , the motor starts too frequently, the use of ambient temperature is too high, poor ventilation, etc., will also lead to the temperature of the motor is too high, reduce the number of starts, reduce the ambient temperature, ensure that the air duct is smooth, eliminate dust and oil, and keep the fan in good operation can help solve similar overheating problems.
In the operation of the motor, if the current does not exceed the rated current of the motor, it means that there is basically no problem on the circuit, if the original load is not changed, to detect whether the voltage is at the rated voltage, generally 380V is plus or minus 5% normal. Check whether the ambient temperature is too high. Whether the bearing is short of oil. The heat dissipation fan is damaged.
(1) Excessive load. The load should be reduced or a larger capacity motor should be replaced.
(2) two-phase operation. Check whether the fuse is blown, whether the contact point of the switch is good, and eliminate the fault;
(3) The motor air duct is blocked. Dust or oil dirt should be removed from the air duct;
(4) The ambient temperature rises. Cooling measures should be taken;
(5) Short-circuit between turns or between phases of the stator winding. Check the insulation resistance between the two phase windings with a megohm meter or multimeter; Current balance method is used to check the three-phase winding current. The phase with large current is short circuit phase. Short circuit detector can also be used to check whether the winding turns are short circuit.
(6) The stator winding is grounded. Use a multimeter or indicator to check, resistance is zero for the ground phase;
(7) The power supply voltage is too low or too high. Check the power supply voltage at the input end of the motor with the voltage stop or voltmeter of the multimeter.