












Introducer
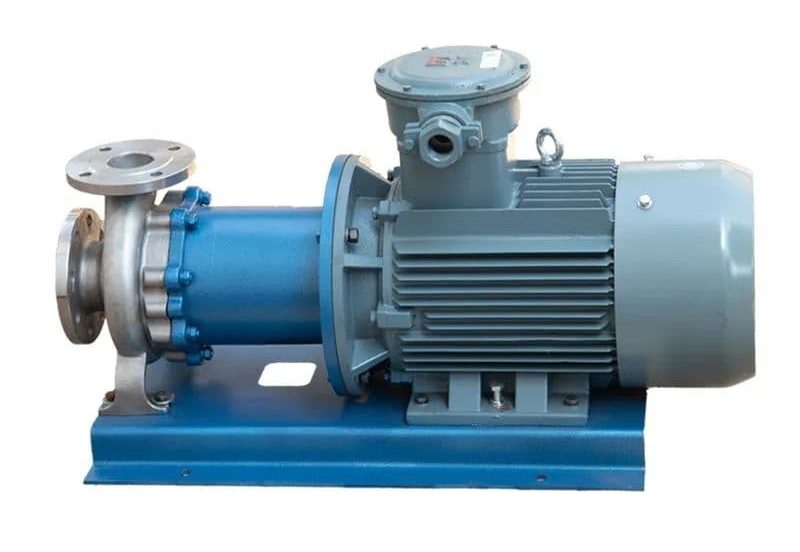
Flammebeskyttet trefaset asynkronmotor i YBX5-serien med lav spændingRamme nummer: H80-355
Kapacitet: 0,55 ~ 450 kW
Antal poler: 2~10P
Spænding: 1140v og derunder
Sammenlignende analyse af pumpemotorens starttilstand
Der er mange måder at starte motoren på, herunder direkte start, autovakuum-start, Y-Δ buck-start, softstarter-start, inverter-start og så videre. Så hvad er forskellen på dem?
1, direkte start med fuldt tryk
Hvis netværkets kapacitet og belastning tillader direkte start med fuld spænding, kan det overvejes at bruge direkte start med fuld spænding. Fordelene er praktisk kontrol, enkel vedligeholdelse og relativt økonomisk. Hovedsageligt brugt til start af små motorer, set ud fra et energibesparelsessynspunkt, bør mere end 11 kW motor ikke bruge denne metode.
2, automatisk dekompressionsstart
Brug af autotransformator multi-tap dekompression, ikke kun for at imødekomme behovene for forskellige belastningsstart, men også for at få et større startmoment, bruges ofte til at starte stor kapacitet motor dekompression starttilstand. Dens største fordel er, at startmomentet er stort, og når dets viklingskranke er på 80%, kan startmomentet nå 64% af den direkte start. Og startmomentet kan justeres ved at trykke på det. Den er stadig meget udbredt i dag.
- Y-Δ starter
For egernbur-induktionsmotoren med trekantede statorviklinger i normal drift, hvis statorviklingerne er forbundet til en stjerneform ved start og derefter forbundet til en trekant efter start, kan startstrømmen reduceres, og dens indvirkning på elnettet kan reduceres. Denne starttilstand kaldes stjernetrekant-dekompressionsstart eller blot stjernetrekant-start (Y-Δ-start).
Når stjernetrekanten bruges til at starte, er startstrømmen kun 1/3 af den oprindelige trekantforbindelsesmetode. Hvis startstrømmen for direkte start måles med 6 ~ 7Ie, er startstrømmen kun 2 ~ 2,3 gange, når stjernetrekanten startes. Det betyder, at når stjernetrekanten bruges til at starte, reduceres startmomentet også til 1/3 af det oprindelige, når trekantforbindelsen startes direkte.
Velegnet til start uden belastning eller med let belastning. Og sammenlignet med enhver anden vakuumstarter er dens struktur den enkleste, prisen er også den billigste. Derudover har stjernetrekantens starttilstand den fordel, at når belastningen er let, kan motoren køres under stjerneforbindelsen. På dette tidspunkt kan det nominelle drejningsmoment matches med belastningen, hvilket kan forbedre motorens effektivitet og dermed spare strømforbrug.
- Blød starter
Dette er brugen af tyristor-faseskift-spændingsreguleringsprincippet for at opnå spændingsregulering af motorstart, hovedsageligt brugt til motorstartkontrol, god starteffekt, men høje omkostninger. På grund af brugen af tyristorkomponenter er tyristorens arbejdsharmoniske interferens stor, hvilket har en vis indvirkning på elnettet.
Desuden vil udsving i elnettet også påvirke ledningen af tyristorkomponenter, især når der er flere tyristorenheder i det samme elnet. Derfor er fejlraten for tyristorkomponenter højere, fordi det involverer effektelektronikteknologi, så kravene til vedligeholdelsesteknikere er også højere.
- Frekvensomformer
Inverteren er den motorstyringsenhed, der har det højeste tekniske indhold, den mest komplette styringsfunktion og den bedste styringseffekt inden for moderne motorstyring. Den justerer motorens hastighed og drejningsmoment ved at ændre frekvensen i elnettet. Fordi den involverer effektelektronikteknologi og mikrocomputerteknologi, er omkostningerne høje, og kravene til vedligeholdelsesteknikere er høje, så den bruges hovedsageligt i områder, hvor hastighedsregulering er påkrævet og hastighedskontrol er påkrævet.
Viden om pumpemotorer
1. en motor er en enhed, der omdanner mekanisk energi til elektrisk energi (eller omvendt) eller ændrer et AC-spændingsniveau til et andet. Ud fra et energiomdannelsesperspektiv kan motoren opdeles i transformatorer, motorer, generatorer og andre tre kategorier.
2. Formlen til beregning af den elektriske vinkel a1 på spalteafstanden er a1 = p×360o/Z. Man kan se, at den elektriske vinkel a1 er lig med p gange den mekaniske vinkel am.
3. princippet om reduktion af transformatorvikling er: før og efter reduktion, sørg for, at viklingens magnetiske kraft er uændret, og sørg for, at viklingens aktive og reaktive effekt er uændret.
4. transformatorens effektivitetskarakteristiske kurve er kendetegnet ved en maksimal værdi, det vil sige, når det variable tab er lig med det konstante tab, nås den maksimale værdi.
5. transformatorens test uden belastning påføres normalt spænding og måles på lavspændingssiden. Kortslutningstesten af transformeren tilfører normalt spænding til højspændingssiden og måler den.
6. Når transformeren kører parallelt, er betingelserne for tomgang og ingen cirkulation: forholdet er det samme, og tilslutningsgruppenummeret er det samme.
7. når transformeren kører parallelt, er belastningsfordelingsprincippet: værdien pr. enhed af transformerens belastningsstrøm er omvendt proportional med værdien pr. enhed af kortslutningsimpedansen. Betingelsen for, at transformatorens kapacitet kan udnyttes fuldt ud i parallel drift, er, at kortslutningsimpedansens enhedsværdi skal være ens, og deres impedansvinkler skal også være ens.