












紹介
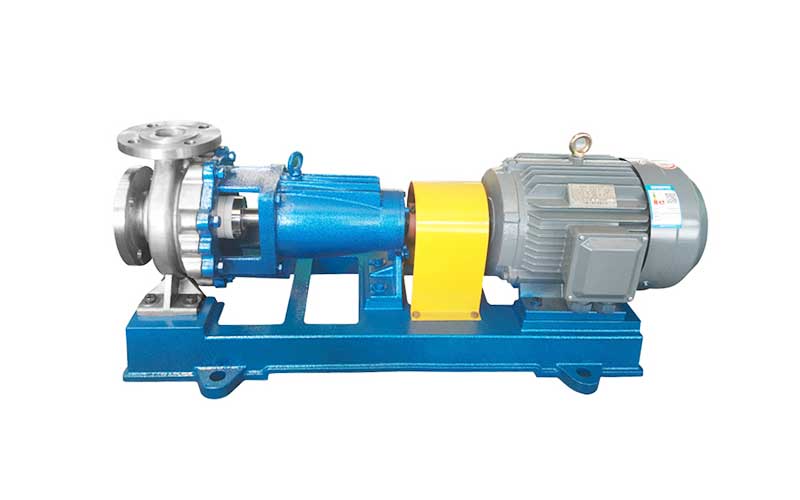
YBX5シリーズ防爆低電圧三相非同期モータフレーム番号:H80-355
容量: 0.55~450kW
極数:2~10P
電圧:1140V以下
ポンプモーターの始動モードの比較分析
モータの始動方法には、ダイレクト始動、オートバキューム始動、Y-Δ降圧始動、ソフトスタータ始動、インバータ始動など多くの方法があります。では、これらの違いは何でしょうか?
1、全圧ダイレクトスタート
ネットワークの容量と負荷が全電圧直接始動を許容する場合、全電圧直接始動の使用を検討することができる。利点は、制御が便利で、メンテナンスが簡単で、比較的経済的であることです。主に小出力モーターの始動に使用され、省エネの観点から、11kW以上のモーターはこの方法を使用すべきではありません。
2 の自動減圧の開始
自動変圧器の複数のタップの減圧の使用は、異なった負荷開始の必要性を満たすためだけまたより大きい開始のトルクを得るために、大きい容量モーター減圧の開始モードを始めるのに、頻繁に使用されます。その最大の利点は、始動トルクが大きいことで、巻線タップが80%の場合、始動トルクは直接始動の64%に達することができます。また、始動トルクはタップによって調整することができます。現在でも広く使用されています。
- Y-Δスタート
通常運転時の固定子巻線が三角形のリスケージ誘導電動機では、始動時に固定子巻線を星形に接続し、始動後に三角形に接続すれば、始動電流を低減でき、電力系統への影響を低減できる。この始動モードはスタートライアングル減圧始動、または単にスタートライアングル始動(Y-Δ始動)と呼ばれる。
スタートライアングルを使用して始動する場合、始動電流は元のトライアングル接続方法のわずか1/3です。直接始動の始動電流を6~7Ieで測定すると、スタートライアングルを始動に使用した場合、始動電流は2~2.3倍にしかならない。これは、スタートライアングルを始動に使用した場合、始動トルクもトライアングル接続で直接始動した場合の1/3に減少することを意味する。
無負荷または軽負荷の始動機会に適しています。そして他のどの真空の始動機と比較されて、構造は最も簡単、価格はまた最も安いです。さらに、星の三角形の開始モードに負荷が軽いとき、モーターが星の関係の下で動くことができる利点があります。このとき、定格トルクを負荷に合わせることができ、モータの効率を向上させることができるため、消費電力を節約することができます。
- ソフトスターター
これは、サイリスタ位相シフト電圧調整原理の使用は、主にモータの始動制御に使用されるモータの始動の電圧調整を達成するために、良好な始動効果が、高コストです。サイリスタ部品を使用しているため、サイリスタの作業高調波干渉が大きく、電力網に一定の影響を与えます。
また、電力系統の変動もサイリスタ部品の導通に 影響を及ぼし、特に同じ電力系統に複数のサイリスタ装 置がある場合は、その影響も大きくなります。そのため、サイリスタ部品の故障率は、パワーエレ クトロニクス技術に関わるため高くなり、保守技術 者への要求も高くなります。
- 周波数変換器
インバーターは現代モーター制御の分野で最も高い技術内容、最も完全な制御機能、最高の制御効果を持つモーター制御装置である。インバーターは、電力網の周波数を変えることによって、モーターの速度とトルクを調整します。パワーエレクトロニクス技術とマイコン技術を含むため、コストが高く、メンテナンス技術者の要求も高いため、主に速度調節が必要で速度制御が必要な分野で使用される。
ポンプモーターの知識
1.モーターとは、機械エネルギーを電気エネルギーに変換(またはその逆)したり、ある交流電圧レベルを別の電圧レベルに変化させたりする装置である。エネルギー変換の観点から、モーターは変圧器、モーター、発電機、その他の3つのカテゴリーに分けられる。
2.スロット距離の電気角a1の計算式は、a1=p×360o/Zである。電気角a1は機械角amのp倍に等しいことがわかる。
3.The 変圧器の巻上げの減少の原則は次のとおりです: 減少の前後に、巻上げの起磁力が不変であることを保障し、巻上げの活動的な、反応力が不変であることを保障して下さい。
4.変圧器の効率特性曲線は、最大値によって特徴付けられます。つまり、可変損失が定損失に等しいとき、最大値に達します。
5.変圧器の無負荷試験は、通常、低圧側に電圧を印加して測定する。変圧器の短絡試験は、通常高圧側に電圧を印加して測定する。
6.変圧器を並列運転する場合、無負荷・無循環の条件は、比率が同じで、接続グループ番号が同じであること。
7.変圧器が並列運転される場合、負荷分配の原理は次のとおりである:変圧器の負荷電流の単位当たりの値は、短絡インピーダンスの単位当たりの値に反比例する。変圧器の容量が並列運転で十分に利用できる条件は、短絡インピーダンスの単位値あたりが等しく、インピーダンス角も等しくなることである。